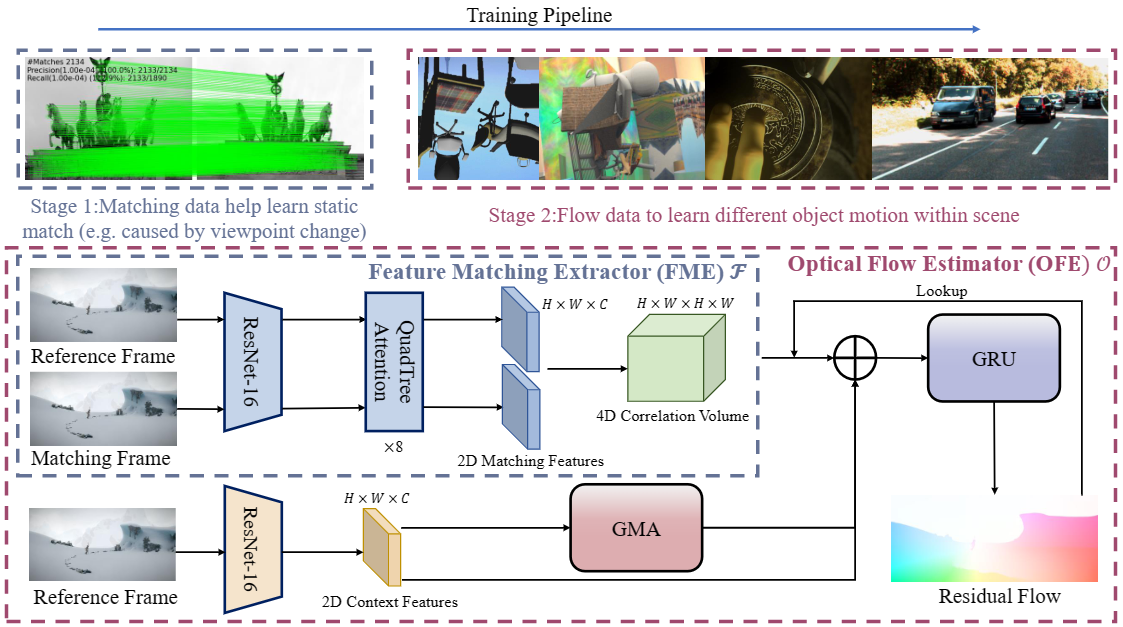
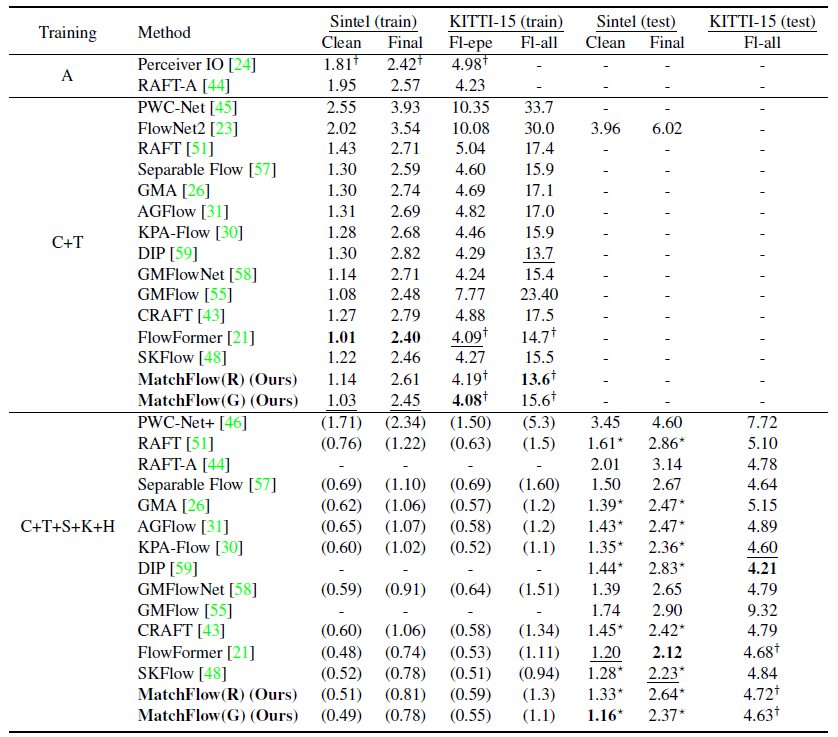
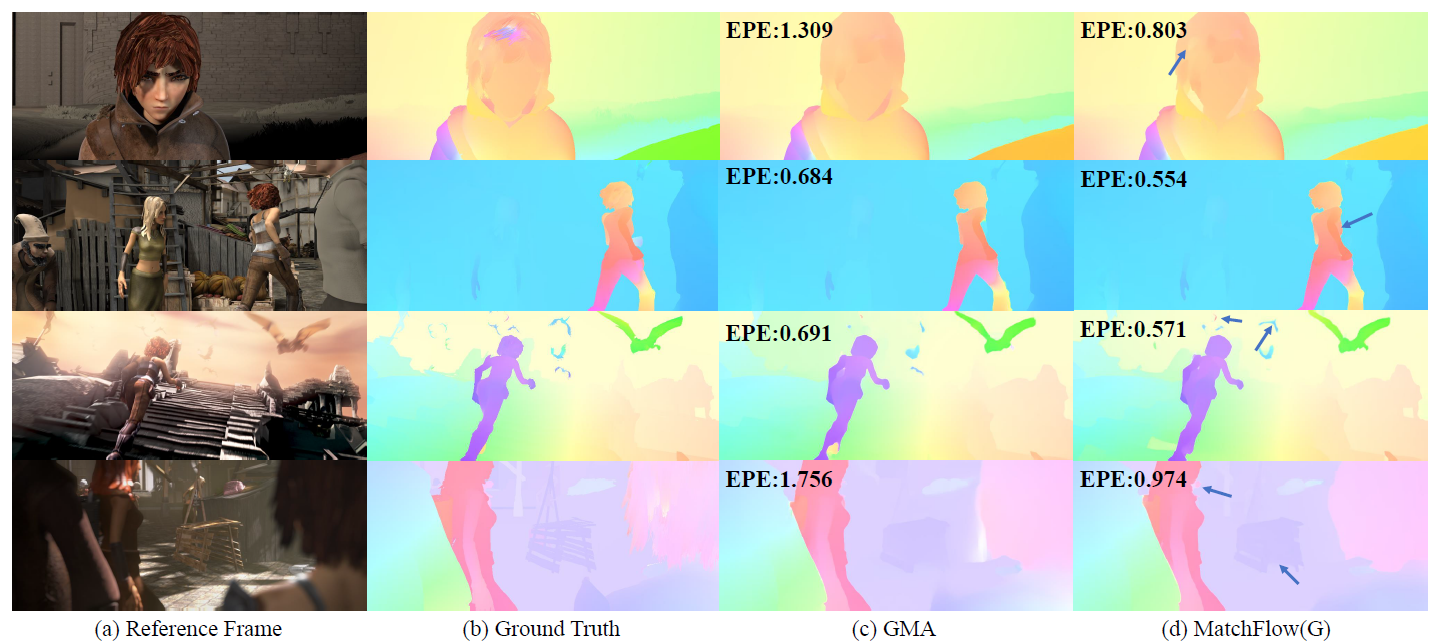
Optical flow estimation is a challenging problem remaining unsolved. Recent deep learning based optical flow models have achieved considerable success. However, these models often train networks from the scratch on standard optical flow data, which restricts their ability to robustly and geometrically match image features. In this paper, we propose a rethinking to previous optical flow estimation. We particularly leverage Geometric Image Matching (GIM) as a pre-training task for the optical flow estimation (MatchFlow) with better feature representations, as GIM shares some common challenges as optical flow estimation, and with massive labeled real-world data. Thus, matching static scenes helps to learn more fundamental feature correlations of objects and scenes with consistent displacements. Specifically, the proposed MatchFlow model employs a QuadTree attention-based network pretrained on MegaDepth to extract coarse features for further flow regression. Extensive experiments show that our model has great cross-dataset generalization. Our method achieves 11.5% and 10.1% error reduction from GMA on Sintel clean pass and KITTI test set. At the time of anonymous submission, our MatchFlow(G) enjoys state-of-theart performance on Sintel clean and final pass compared to published approaches with comparable computation and memory footprint.
@inproceedings{dong2023rethinking,
title={Rethinking Optical Flow from Geometric Matching Consistent Perspective},
author={Dong, Qiaole and Cao, Chenjie and Fu, Yanwei},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
year={2023}
}